Fachgebiet für Verkehrssystemplanung und Verkehrstelematik
Kommende Veranstaltungen
Keine aktuellen Veranstaltungen gefunden.
Übersicht der angebotenen Lehrveranstaltungen
Aktuelle Informationen (ISIS-Kurs, Termine etc.) zum laufenden Semester entnehmen sie bitte der entsprechenden Semesterübersicht für das laufende/kommende Sommer- oder Wintersemester.
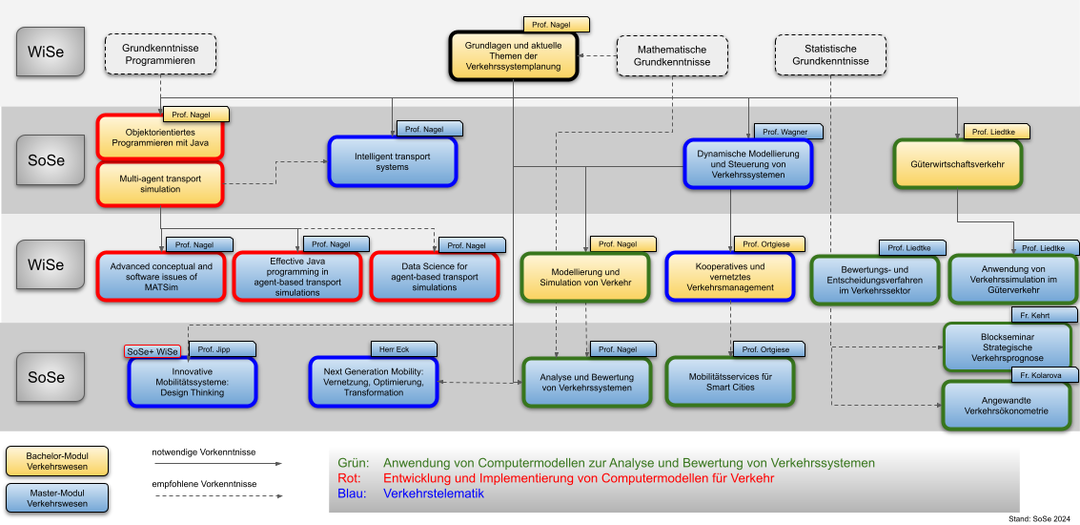
Die folgende Übersicht zeigt in welchem Semester die Module üblicherweise durchgeführt werden. Änderungen sind vorbehalten. Bei Fragen wenden Sie sich bitte an lehre(at)vsp.tu-berlin.de
Unser Standort
 Fachgebiet für Verkehrssystemplanung und Verkehrstelematik
Fachgebiet für Verkehrssystemplanung und Verkehrstelematik-
TU Berlin Hauptgebäude
Kontakt
Fachgebiet für Verkehrssystemplanung und Verkehrstelematik
| Sekretariat | KAI 4-1 |
|---|---|
| Gebäude | KAI |
| Raum | 5210 |
| Adresse | Kaiserin-Augusta-Allee 104 D-10553 Berlin |
| Mo | 10:00-16:00 |
| Do | 15:00-18:00 |
| Hinweis | Sprechstundentermine bitte vorab per E-Mail vereinbaren: sekretariat@vsp.tu-berlin.de oder lehre@vsp.tu-berlin.de |